Videos
Videos

In the video we can see a surgeon performing the task of peg transfer. The surgeon must move every triangle from the pegs, from the left to the right as fast as they can, and then from the right to the left. For example, when moving a triangle from the left, the surgeon must first pick it up with the left hand, move it to the right hand and finally put it down on a peg on the right side. While the task is performed, we examine if the surgeon holds the triangles correctly, do not drop them along the way, keep the free hand in place while the other transfers the triangle and so on.


Medical simulators provide a controlled environment for training and assessing clinical skills. However, as an assessment platform, it requires the presence of an experienced examiner to provide performance feedback, commonly performed using a task specific checklist. We have developed an autonomous and a fully automatic speech-based checklist system, capable of objectively identifying and validating anesthesia residents’ actions in a simulation environment.
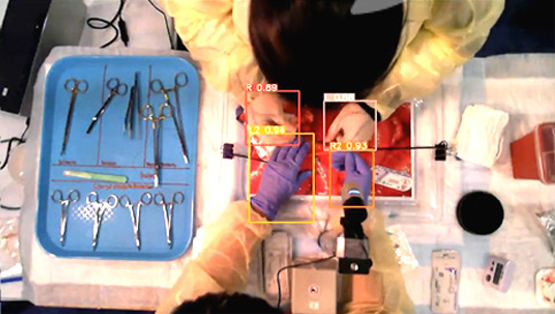
The Surgical Metrics Project aims at using wearable technologies to measure surgical skill. The project is led by the T.E.C.I center at Stanford. This video demonstrates the use of deep learning for automatic surgical workflow analysis of an open surgery bowel simulator. Analysis done by the Scalpel Lab at the Technion.
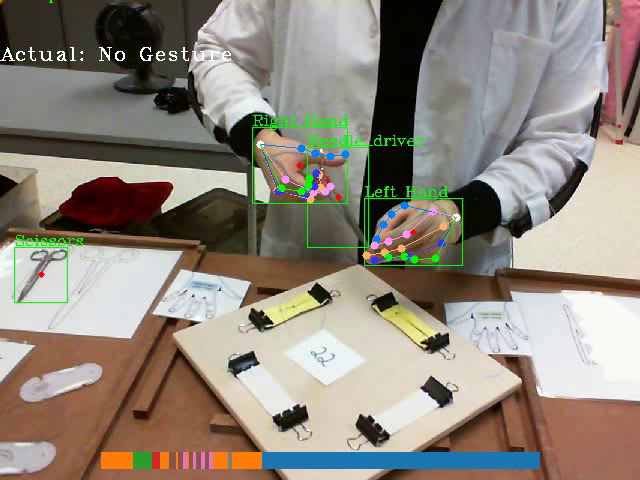
Pose Estimation is a computer vision problem where the goal is to detect the position and orientation of a person or an object. It is usually done by estimating the location of specific key-points and using them to predict an object’s pose. In the case of hands, the pose consists of 21 key-points, one for the wrist and 4 for each of the 5 fingers.
The goal of this work is to study the impact of hand pose estimation on the assessment of surgical skill as well as automatic surgical workflow.